






Handling Robot
Turin - Handling/Stacking Robot Arm TKB2670
BASIC PARAMETE
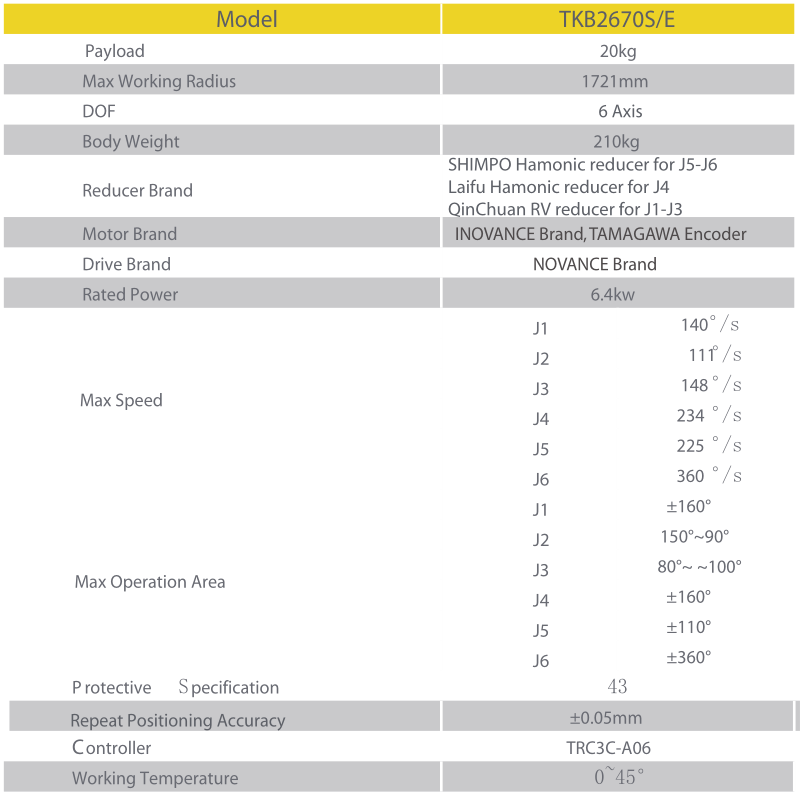
*Model: TKB2670 S/E
*Payload: 20 Kg
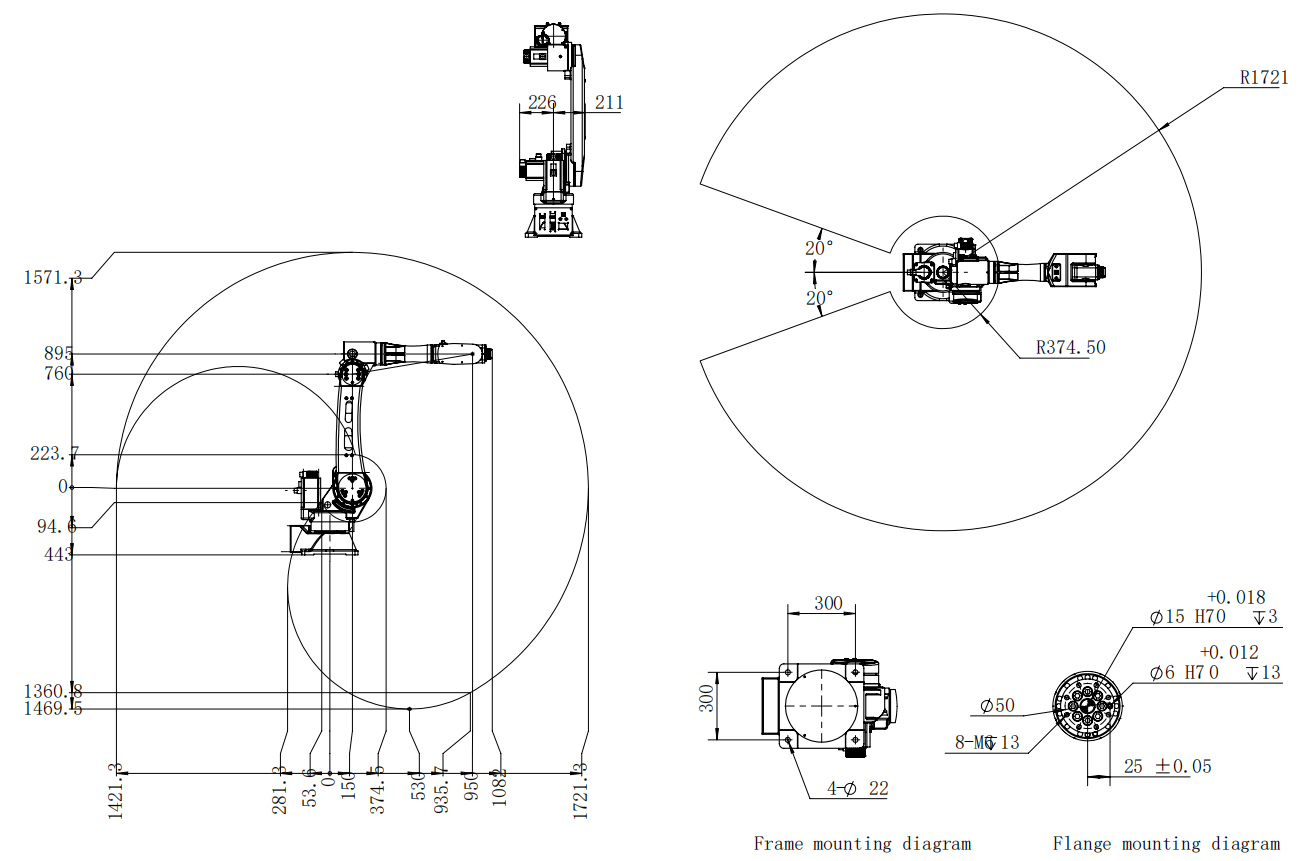
*Arm Reach: 1721 mm
*Dof: 6 dof
*Reted Power: 6.4 KW
*Body Weight: 210 Kg
CHARACTER
*Can match with a variety of visual systems
*Support external PLC; Optional with Profinet, DeviceNet Module
*Used for handling, sorting, palletizing, bending, loading and unloading, stamping, polishing, etc.
DOWNLOAD DOCUMENT
FEATURES
※Robotic arm span is 1721mm 20kg Payload. It can be installed on the ground or upside down flexibly
※With large working space and fast running speed, our industrial robots are ideal for welding, spraying, machine tool loading and unloading, handling, sorting, assembling and other applications
※Use Italian design technology in mechanical and circuit,and take in ABB wiring layout technology in our robot body manufacturing. Use modular design to simplify wiring, double safety circuit design, and dust protection design for electricity cabinet
※Support Single phase, 220V working voltage can be better adapted in Various environments. The robot body is with dual-circuit gas pipe and meets the welding and handling requirements
※Programmable robot body, cables are made of special cables for flexible robots
※6+3 Axis (Standard 6 Axis, External 3 Axis is Optional)
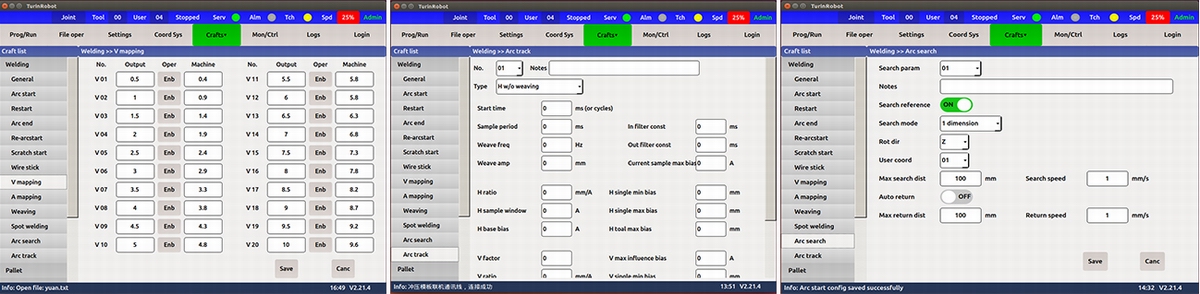
※Support External PLC, arc tracking and other accessories (optional), visual software (optional), laser tracking software (optional), arc tracking software (optional), etc.
※Support Chinese/English/Japanese/Polish spanish.
ROBOT ARM PROCEDURE
※ Bending:Can realize constant speed tracking, real-time sensor tracking, bending following and automatic return to equality function.
※ Spaying:Four analog interfaces are provided, and standard trajectory template is built-in to generate spray trajectory quickly. At the same time, it supports users to build their own spraying trajectory.
※ Palletizing:By setting the basic parameters of the size, number and number of layers of palletizing, the palletizing and disassembling functions can be realized by simple palletizing instructions.
※ Tracing:When the object moves on the conveyor belt, it can realize single tracking (grabbing, spraying, etc.) or multiple tracking (assembling, etc.) of the product. It can set tracking detection point, start point, end point and detection range arbitrarily.
※ Press tending:For press punching industry, a set of solutions for punching process, punching interface and punching connection are developed, which are convenient for customers to connect quickly, use easily and adjust the rhythm.
※ Pick and place.
VISION & TRACKER
※Support third-party vision devices and protocols; such as Omron, Cognex, DALASA, etc.
※Three triggering modes of support instruction, timing and distance
SPECIFICATION DATA
MOTION RANGE
CONFIGURATION LIST